
Dr Joseph Hoo (www.ob-ultrasound.net)
Il problema della sicurezza degli ultrasuoni ad uso diagnostico non sfuggì agli studi sin dal principio, soprattutto quando negli anni ’40 ultrasuoni di potenza elevata venivano impiegati per scopi distruttivi e terapeutici.
In seguito a un certo numero di rapporti iniziali che non avevano dimostrato alcun effetto nocivo dell'esposizione agli ultrasuoni delle cellule umane, Ian
Donald, nel 1967, in collaborazione con Malcolm Ferguson-Smith, direttore del laboratorio di citogenetica del Queen Mother's Hospital, eseguì approfonditi esperimenti per delineare gli effetti nocivi possibili degli ultrasuoni ad alta intensità sui cromosomi in interfase e mitotici, e non ne trovò. Altri studi nel 1963 al Centro di Ricerca sugli Ultrasuoni Juntendo in Giappone egualmente non rivelarono alcun effetto nocivo su ratti femmina incinte esposte alla potenza massima delle apparecchiature diagnostiche per 3
giorni dopo fertilizzazione. Nel 1964 Bertil Sunden a Lund, in Svezia, nella sua tesi di ricerca non trovò alcun effetto teratogeno. Nel 1967 anche altri studi intrapresi in Inghilterra da EI
Kohorn e negli Stati Uniti da John C. Hobbins non mostrarono alcun effetto citologico apprezzabile. Gli studiosi ricercarono in particolare un aumento di scambi fra cromatidi gemelli da esposizione ad ultrasuoni. Nel 1970 uno studio di LM Hellman su 400 neonati
sottoposti ad ultrasuoni prima della nascita non rivelò un’aumentata incidenza di anomalie infantili. Seguirono molti altri studi. Un Comitato di Bioeffetti venne organizzato nell’ AIUM, col compito di revisionare e controllare periodicamente la letteratura mondiale sugli effetti
biologici degli ultrasuoni.
La visualizzazione in A-mode venne impiegata per la localizzazione della placenta in Europa ed in Gran Bretagna alla fine degli anni '50 - inizio '60.
La visualizzazione M.-mode (tempo-movimento) venne descritta per la prima volta da Inge
Edler e da Hellmuth Hertz a Lund, in Svezia nel 1954, usando un rilevatore di difetti dei metalli modificato della tedesca Siemens® . Essi dimostrarono la possibilità di registrare i movimento valvolari cardiaci con gli ultrasuoni. Sven Effert in Germania, che
aveva collaborato con Hertz in alcuni del suoi lavori, dimostrò chiaramente l'utilità dell’ecocardiografia in M.-mode, futuro pilastro della diagnostica cardiologia.
Le tecniche ultrasoniche col doppler per lo studio sui movimento valvolari cardiaci vennero sviluppate per primi da Shiegeo Satomura e da Yasuhara Nimura all' Istituto di ricerca scientifica ed industriale di Osaka, in Giappone nel 1955.
Il principio di Doppler in realtà era stato esposto per la prima volta 100 anni prima da Christian Andreas Doppler in Austria nel 1842. Successivamente il lavoro di “sfondamento” fu compiuto dal gruppo dell' università di Washington a Seattle dal 1964 in poi, e venne condotto da Robert Rushme, Dean Franklin e Donald Baker, tre bioingegneri che si occuparono dell’impiego degli ultrasuoni in medicina; più tardi da John Reid e da George Tome.
Nel 1964 D. Eugene Strandness descrisse e pubblicò i primi segnali flussimetrici. Così nel 1974 si giunse alla produzione di strumenti doppler pulsati. Verso la fine degli anni 60 il gruppo di Takeuchi
in Giappone, di Peronneau a Parigi e quello di Wells a Bristol, in Inghilterra erano molto attivi nello sviluppo dei dispositivi doppler pulsati
I dispositivi d'esplorazione B-mode all’inizio usavano un tipo di rilevazione “a soglia” che registrava gli echi come dei puntini di luce su uno schermo rivestito di fosforo di un oscilloscopio.
Veniva utilizzato un tubo a raggio catodico “a memoria” o “bi stabile”. Gli echi sopra una certa ampiezza venivano visualizzati 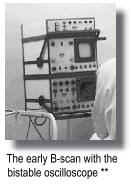 come puntini di intensità costante e gli echi di minore ampiezza sotto la soglia non venivano registrati. Il sonogramma finale veniva riprodotto in una fotografia in bianco e nero della polaroid® (disponibile dal 1959 sia in Inghilterra che negli Stati Uniti) senza informazioni sull’ampiezza degli echi.
C'era buona rappresentazione delle dimensioni, della figura e della
posizione ma senza una descrizione degli echi interni. Divenne presto chiaro che era necessario una specie di “scala dei grigi” se si volevano aumentare le possibilità diagnostiche e l’accuratezza dell’esame B-mode.
come puntini di intensità costante e gli echi di minore ampiezza sotto la soglia non venivano registrati. Il sonogramma finale veniva riprodotto in una fotografia in bianco e nero della polaroid® (disponibile dal 1959 sia in Inghilterra che negli Stati Uniti) senza informazioni sull’ampiezza degli echi.
C'era buona rappresentazione delle dimensioni, della figura e della
posizione ma senza una descrizione degli echi interni. Divenne presto chiaro che era necessario una specie di “scala dei grigi” se si volevano aumentare le possibilità diagnostiche e l’accuratezza dell’esame B-mode.
L’innovazione più grande in ecografia successiva all'invenzione del dispositivo d'esplorazione a contatto a braccio snodabile
fu il convertitore di immagini. Il tubo a raggi catodici aveva un “range” dinamico basso, di circa 16 decibel. I tentativi iniziali di creare una scala dei grigi vennero fatti con l' uso d'un oscilloscopio a persistenza breve, e cambiando i tempi di esposizione dell' otturatore nella fotografia. Ciò dava luogo approssimativamente a sole 4 tonalità di grigio
nell' immagine finale ma il processo era difficile da gestire e risultava imprevedibile.
In seguito, prima della comparsa del convertitore di immagini, gli echi venivano compressi per mezzo di sofisticati amplificatori a compressione logaritmica per ridurre la massima quantità di informazioni possibile nel “range”,
ottenendo così un certo grado di scala di grigi. Le macchine costruiite a Glasgow verso la metà degli anni ’50 erano dotate di scale di grigi. La funzione dell'elaboratore dei segnali era di ottenere una immagine in base agli impulsi nel tempo, nel
tentativo di separare gli eco in arrivo in spazi di tempo brevi, e permettendo una visualizzazione in modo di registrare l’ampia gamma dinamica di segnali che venivano ricevuti, senza andare fuori range da un lato, o senza eliminare gli echi “piccoli” dall’altro. Il fuoco a quel tempo era piuttosto una "riduzione del rumore di fondo" tramite una integrazione di segnali, poichè si basava su un “aggiustamento”
della vasta gamma dei segnali ricevuti. Il convertitore analogico di immagini usava un obiettivo al silicone che fungeva da tabella di capacità e che veniva esplorato da un fascio di elettroni che lo leggeva e che visualizzava le informazioni su un' unità video. Facendo così, la tecnologia basata sui processori di calcolo, che nasceva proprio in quel periodo, venne applicata all’elaborazione dei segnali. Le immagini poterono dunque venire regolate, riprodotte, calibrate su
schermo, ed elaborate in una scala di grigi.
L' applicazione di un vero gradiente di grigi si sviluppò in seguito al lavoro del gruppo di Kossoff
all' Istituto Ultrasonico di Sydney (precedentemente chiamati Laboratori Nazionali di Acustica), in Australia. George  Kossoff, fisico e direttore della Sezione di Ricerca sugli Ultrasuoni, aveva inventato ed affinato un'apparecchiatura ad ultrasuoni per diversi scopi incluse le applicazioni oftalmiche sin dal 1959. Insieme a William Garrett, un ginecologo, ed a due brillanti ingegneri,
George Radovanovitch e David Carpenter, pubblicarono nel 1973 il loro nuovo convertitore di immagini con scala di grigi, basato sul lavoro che già avevano iniziato sin dal 1969.
Kossoff, fisico e direttore della Sezione di Ricerca sugli Ultrasuoni, aveva inventato ed affinato un'apparecchiatura ad ultrasuoni per diversi scopi incluse le applicazioni oftalmiche sin dal 1959. Insieme a William Garrett, un ginecologo, ed a due brillanti ingegneri,
George Radovanovitch e David Carpenter, pubblicarono nel 1973 il loro nuovo convertitore di immagini con scala di grigi, basato sul lavoro che già avevano iniziato sin dal 1969.
Intorno al ' 73 - '74 anche altri centri in Gran-Bretagna ed in Europa pubblicarono apparecchi simili. Nel 1974 il gruppo di Kossoff
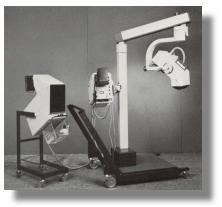
costruì e presentò l’Octoson®, un dispositivo d'esplorazione veloce a bagno d'acqua ad 8-trasduttori che realizzava le sue immagini tramite una combinazione delle vibrazioni dei vari trasduttori ed il loro funzionamento sequenziale in eco pulsato. La
macchina produceva immagini stupefacenti. Le apparecchiature a scala di grigi entrarono rapidamente in commercio sin dal 1975. L’ecografia a scala di grigi, da quando Kossoff la presentò, “ebbe una brevissima fase di transizione fra invenzione e diffusione": ciò perché i miglioramenti nella qualità
e nella interpretazione delle immagini furono veramente incredibili. Un apparecchio simile venne elaborato al Royal Marsden Hospital in Inghilterra allo stesso tempo da Kenneth Taylor e da David Carpenter, l’ingegnere dal gruppo di Kossoff. Insieme a CR
Hill ed a VR McCready il gruppo nel 1973 pubblicò la sua esperienza con immagini in scala di grigi e diede una dimostrazione della loro versione di sonda da contatto in scala di grigi. Kenneth Taylor divenne poi Professore di Radiologia all'Università di Yale.
Con il miglioramento della tecnologia informatica, all’inizio degli anni ‘80 il convertitore analogico delle sonde venne sostituito da convertitori digitali (DSC). David
Robinson e George Kossoff descrissero uno dei primi DSC nel 1979, impiegando una memoria digitale di 512x512 pixel. Le immagini erano più stabili e c’era la possibilità di leggere e di scrivere in contemporanea, il che rendeva l’apparecchio più versatile. Divennero così disponibili macchine a 4 (16 tonalità di grigio) ed a 5 bit (32 tonalità).
Gli sviluppi successivi nella formazione e nella conversione di immagini eco-pulsate si basarono sulla comprensione che gli echi ultrasonori avevano origine non solo dalle grandi superfici, ma anche dalle più piccole strutture meccaniche del corpo umano. I miglioramenti si orientarono dunque nella rilevazione di piccoli echi in
presenza di disturbi e nel visualizzare le informazioni successive nella gamma dinamica più completa dei dettagli spaziali, ottenendo maggiore risoluzione con maggiori livelli di luminosità delle immagini.
L’innovazione che cambiò radicalmente la pratica dell'esame ad ultrasuoni fu l' avvento di apparecchi real-time. Il primo dispositivo d'esplorazione in tempo reale, noto allora come B-scanner
veloce, venne ideato da W. Krause e da R. Soldner, e costruito nel 1965 col nome di
 Vidoson® dalla Siemens Medical Systems in Germania. Il Vidoson era dotato di 3 trasduttori ruotanti alloggiati davanti uno specchio parabolico in un sistema ad acqua e produceva 15 immagini al secondo. L'immagine era composta di 120 righe. L' uso di trasduttori ad ampia superficie con fuoco fisso produsse buone
risoluzioni ed immagini.
Vidoson® dalla Siemens Medical Systems in Germania. Il Vidoson era dotato di 3 trasduttori ruotanti alloggiati davanti uno specchio parabolico in un sistema ad acqua e produceva 15 immagini al secondo. L'immagine era composta di 120 righe. L' uso di trasduttori ad ampia superficie con fuoco fisso produsse buone
risoluzioni ed immagini.
Da allora, altri sistemi meccanici vennero studiati e divennero presto disponibili quale il sistema di rotazione circolare della austriaca Kretztechnik®. James
Griffith e Walter Henry produssero nel 1973 dei trasduttori meccanici  oscillanti in tempo reale molto migliori e capaci di produrre nitide immagini settoriali di 30 gradi in tempo reale. Questi vennero successivamente estesamente impiegati nei dispositivi d'esplorazione cardiaci.
oscillanti in tempo reale molto migliori e capaci di produrre nitide immagini settoriali di 30 gradi in tempo reale. Questi vennero successivamente estesamente impiegati nei dispositivi d'esplorazione cardiaci.
I dispositivi d'esplorazione elettronici entrarono in commercio nella seconda metà degli anni 70. I primi trasduttori lineari ad allineamento, disponibili sul mercato dal 1973, erano formati da 64 cristalli disposti in fila. Esiste una commutazione elettronica nel passaggio dai singoli piccoli
elementi o gruppi di elementi di cristallo in un modello capace di produrre il cosiddetto fuoco dinamico. Il trasduttore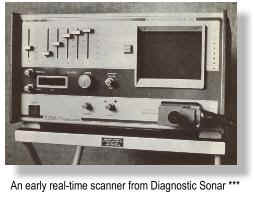 è opportunamente collegato alla sezione comandi principale da un cavo flessibile. I dispositivi d'esplorazione statici compositi continuarono la loro tradizione di macchine voluminose e ingombranti (probabilmente influenzate dal disegno delle altre macchine capaci di produrre immagini, quali quelle delle tomografie a raggi X).
è opportunamente collegato alla sezione comandi principale da un cavo flessibile. I dispositivi d'esplorazione statici compositi continuarono la loro tradizione di macchine voluminose e ingombranti (probabilmente influenzate dal disegno delle altre macchine capaci di produrre immagini, quali quelle delle tomografie a raggi X).
I nuovi dispositivi d'esplorazione statici, capaci d'immagini eccellenti, all' inizio degli anni 80 erano ancora in fase di programmazione. Si pensava che le macchine real-time potessero svolgere un ruolo
complementare a quelle statiche nella valutazione delle strutture in movimento. Le macchine statiche invece vennero sostituite o eliminate con una velocità maggiore del previsto. Non c’era apparentemente nessun vantaggio pratico, economico o clinico nell’uso di queste macchine costose rispetto a quelle in real-time più mobili e flessibili. Il passaggio all’uso di queste ultime ebbe seri risvolti finanziari per alcune aziende che avevano ancora in magazzino grandi quantità di dispositivi d'esplorazione
statici
Il concetto degli allineamenti elettronici a più elementi venne descritto per primo da Werner Buschmann in un' applicazione oftalmologica nel 1964 a Berlino Est; venne migliorata da Nicolaas Bom a Rotterdam nel 1971. Il primo trasduttore lineare di allineamento di Bom era formato da 20 cristalli
ed produceva immagini in movimento a 17 fotogrammi al secondo. In collaborazione con l’industria olandese Organon Teknika, essi produssero e misero in commercio probabilmente il primo dispositivo elettronico d'esplorazione in tempo reale nel mondo.
Un altro dei primi trasduttori ad allineamento lineare venne costruito al Stanford Research Institute in California e venne descritto da Zatz e da Marich nel 1975. Tali macchine sequenziali a più elementi vennero descritte al Secondo Congresso Europeo sugli Ultrasuoni in Medicina da altri gruppi in Europa durante lo stesso anno. Martin Wilcox, fondatore ed
ingegnere dell’Acoustic Diagnostic Research Coporation (ADR, un' azienda statunitense fondata nel 1972) progettò e produsse uno dei primi modelli disponibili in commercio di dispositivi lineari d'esplorazione in real-time fissando le linee-guida per i successivi sviluppi. Il loro secondo modello il 2130, messo in commercio nel 1975 ebbe grande successo negli Stati Uniti e venne venduto in oltre 5000 unità. Le tecnologie ad allineamento lineare e anulare vennero studiate attentamente, all' inizio
degli anni 70, anche dai giapponesi (Aloka, Toshiba), che stavano avanzando con molto successo in ingegneria elettronica in molti settori.
Le immagini dei primi modelli non erano tuttavia eccezionali in gran parte a  causa della piccolezza dei cristalli e delle gravi distorsioni di immagine dell’elaborazione elettronica. I più piccoli trasduttori ad allineamento di fase ed ad allineamento anulare con circuiti elettronici più complicati divennero di moda e
divennero i più impiegati per gli esami ecocardiografici. Questi meccanismi d'esame vennero descritti d
causa della piccolezza dei cristalli e delle gravi distorsioni di immagine dell’elaborazione elettronica. I più piccoli trasduttori ad allineamento di fase ed ad allineamento anulare con circuiti elettronici più complicati divennero di moda e
divennero i più impiegati per gli esami ecocardiografici. Questi meccanismi d'esame vennero descritti d a Jan C. Somers all' Università
di Limberg nei Paesi Bassi e vennero impiegati a partire dal 1968, parecchi anni prima degli apparecchi a sistema lineare. Attività pionieristiche in progetti di allineamento ed in tecniche di focalizzazione elettronica vennero condotte anche da Frederick Thurstone negli Stati Uniti.
a Jan C. Somers all' Università
di Limberg nei Paesi Bassi e vennero impiegati a partire dal 1968, parecchi anni prima degli apparecchi a sistema lineare. Attività pionieristiche in progetti di allineamento ed in tecniche di focalizzazione elettronica vennero condotte anche da Frederick Thurstone negli Stati Uniti.
L' ingegneria legata alle sonde ecografiche passò presto nelle mani delle aziende commerciali piuttosto che dei clinici. Le compagnie che si evidenziarono con la produzione di apparecchi in real-time furono Aloka®, Toshiba® e Shimadsu® in Giappone; EMI®, Diagnostic Sonar®, Siemens®, KretzTechnik®, Bruel e Kjaer®, GEC®
Philips® e Roche-Kontron® in Europa; ADR®, SKI®, Phosonic Searle®, Technicare® e Diasonics® negli Stati Uniti.
I lavori di Kasai, K Namekawa e A.Koyano in Giappone, pubblicati in lingua inglese nel 1985, condussero rapidamente al concetto che fosse possibile ottenere immagini di flusso a colori in real-time. Essi fecero uso di un rilevatore di fase basato su una tecnica di autocorrelazione in cui il cambio di fase di un segnale forniva informazioni su un cambio di velocità
lungo il fascio ultrasonico. Questo metodo basato su tracciati a colori dei flussi è in uso ancora oggi.
La qualità delle immagini dei dispositivi ecografici in tempo reale produsse, con il perfezionarsi dei microprocessori, ulteriori miglioramenti durante la metà degli anni 80 ed all'inizio degli anni 90. Tuttavia fu alla metà degli anni 90 che si ebbero i maggiori progressi nella qualità delle immagini.